|
I am a PhD student at CIIRC CTU in Prague, under the supervision of Torsten Sattler. Currently, my main focus is on visual localization. I've studied my Bachelor's and Master's degrees at FEE, CTU in Prague, dealing with a generation of NDT maps from CAD floor plans and visual robot localization using an omnidirectional camera. Email / CV / Google Scholar / Github |

|
|
At the moment, I focus mainly on exploring the use of non-standard representations for the visual localization task. |
|
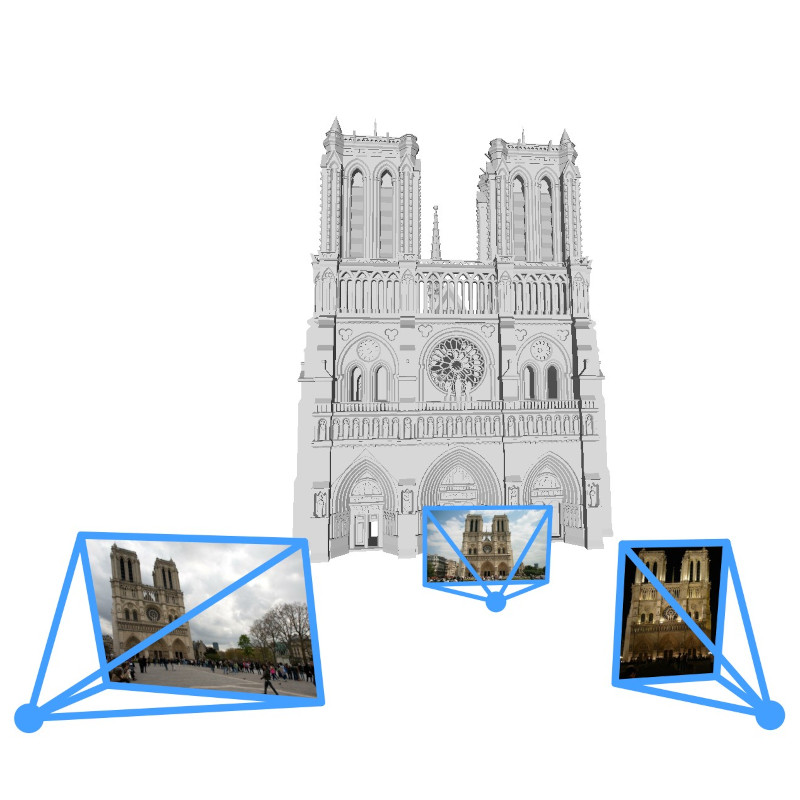
Vojtech Panek, Zuzana Kukelova, Torsten Sattler The IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023 arXiv / benchmark / data / bibtex Exploring the use of 3D models from the Internet for visual localization and studies studies how the imperfections of these models affect localization accuracy. Accompanied by the benchmark. |

|
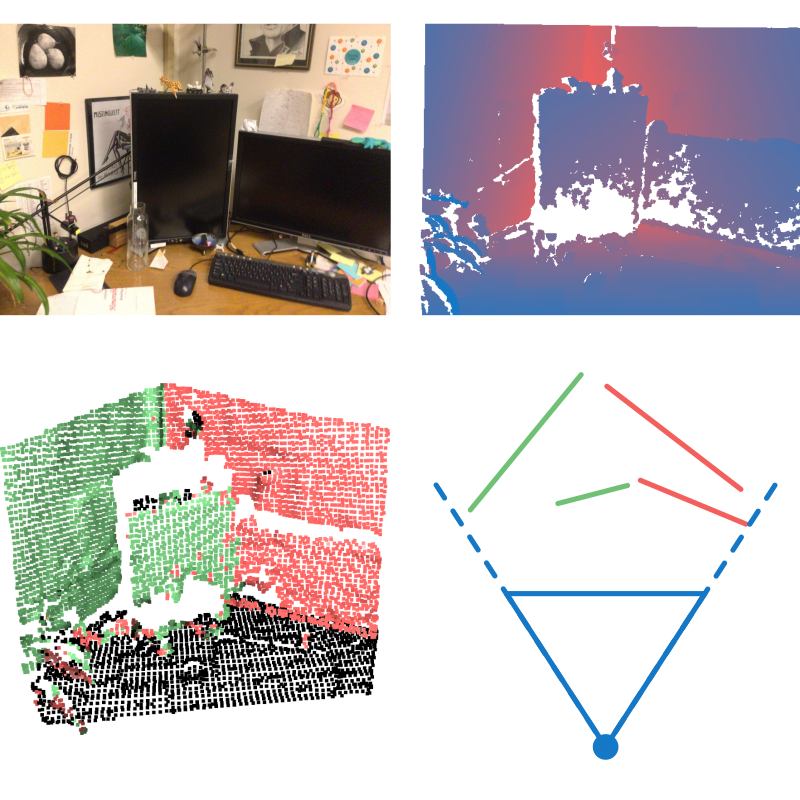
Vojtech Panek, Zuzana Kukelova, Torsten Sattler European Conference on Computer Vision (ECCV), 2022 arXiv / code / data / bibtex Visual localization pipeline storing just 3D mesh as the representation of the environment. Rendering virtual views and using modern local features on-the-fly. Suprisingly can work somehow even on meshes without any color information. |
|
Vojtech Panek, supervised by Torsten Sattler International Student Conference on Electrical Engineering (POSTER), 2022 paper / poster Two-stage visual localization pipeline with environment outlines (floor plans / buildings from OSM) as environment representation. Using retrieval on set of local outlines for coarse pose estimate and ICP for pose refinement. |
I am a teaching assistant for a few courses at the Faculty of Electrical Engineering, CTU in Prague:
- [GVG] Geometry of Computer Vision and Graphics (Summer 2021 - 2023)
- [DZO] Digital Image (Winter 2021 - 2022, Summer 2023)
Check CourseWare for up-to-date information on the courses.